Au début de l’année 2024, les cartes électroniques d’origine contrôlant les moteurs de la coupole ont été remplacées par un ensemble réalisé par nos soins. L’objectif était d’asservir la position de la coupole sur celle du télescope.
Les besoins
Lors de nos séances d’imagerie et d’observation photométrie, la durée des prises de vue implique de longues périodes d’observation. En conséquence, il faut régulièrement repositionner la coupole par rapport au télescope afin de pouvoir observer le ciel. Afin de rendre plus pratique les longues prises de vue, nous avons opté pour l’asservissement de la position de la coupole sur l’azimut du télescope. Des systèmes existent dans le commerce à des prix relativement élevés par rapport à la solution que nous avons conçu. Il a donc fallu concevoir l’électronique de pilotage de la coupole, choisir un protocole de communication, faire des adaptations mécaniques …
La conception
– L’encodeur
Afin de connaître la position de la coupole nous avons opté pour un encodeur incrémental. L’encodage est donc relatif. Le principe est de compter des impulsions donnant la position de la coupole à intervalle régulier. Un capteur complémentaire permet de connaître la position d’origine de la coupole.
> La mécanique
La partie mécanique réalisée par Michel doit compenser le débattement radial et vertical de la crémaillère. En effet, la crémaillère de la coupole est constituée d’un ensemble de portions dont le rayon de courbure n’est pas constant.
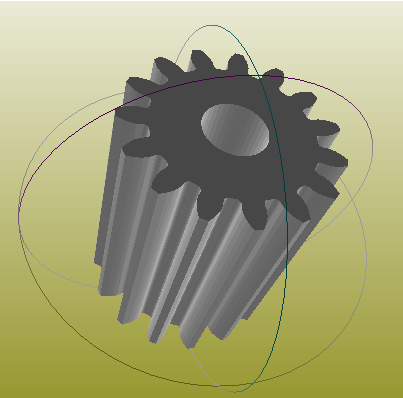 |
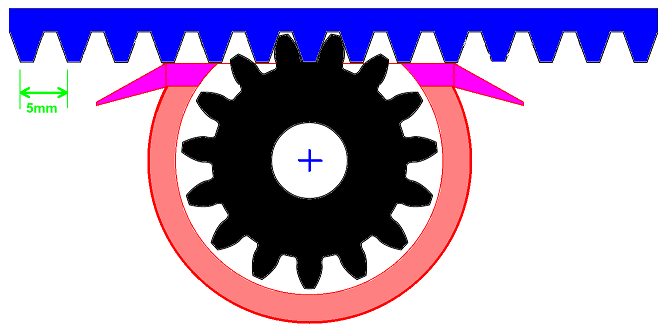
La partie délicate est le pignon d’entraînement. La crémaillère a un pas de 5mm. Le module du pignon est donc 5/3,14 soit 1,59mm. De plus pour compenser le débattement radial de la crémaillère nous optons pour un pignon large… |
| Nous avons réalisé le pignon en impression 3D en Nylon 11PA imprimé chez Sculpteo. En raison de contrainte de place, le pignon comportera 15 dents. |  |
 |
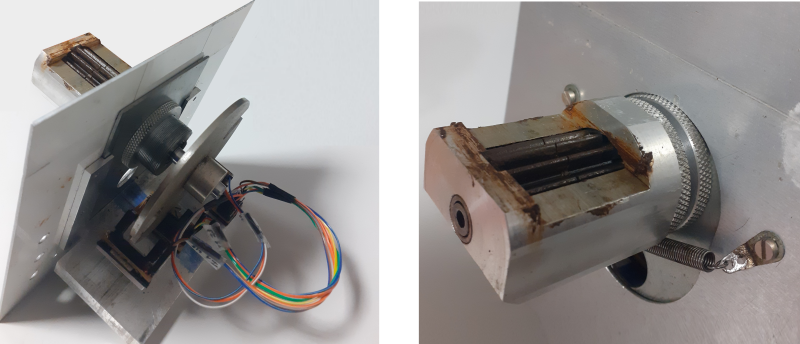
Afin de compenser le débattement en hauteur de la crémaillère Michel imagine un système sur glissière avec une force de rappel assurée par un ressort. Le pignon reste ainsi en contact avec la crémaillère. Afin que le pignon en plastique ne supporte pas la force de pression due à la coupole, la géométrie du support du pignon est conçue pour assurer cette fonction. |
 |
Un disque comportant deux encoches sera entraîné par le pignon. De cette façon la précision du système pour le positionnement de la coupole est de l’ordre de 360/(5000mm*3,14/(15*5mm/2)) ≈ 0,9 degré.
> L’électronique
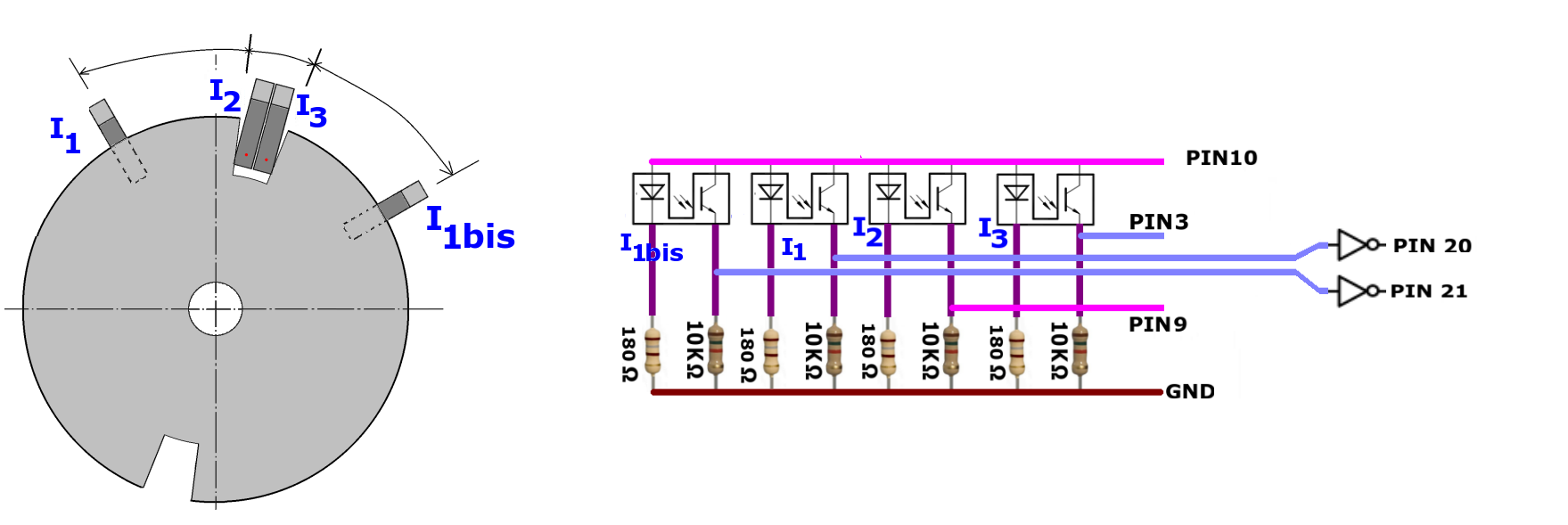
Le système d’incrémentation est assuré par des capteurs optoélectroniques. Une couple de capteurs assure la détection de l’impulsion et le sens de rotation. Afin d’éviter les erreurs de détection d’impulsion 2 autres capteurs assurent la réactivation de la comptabilisation.
 |
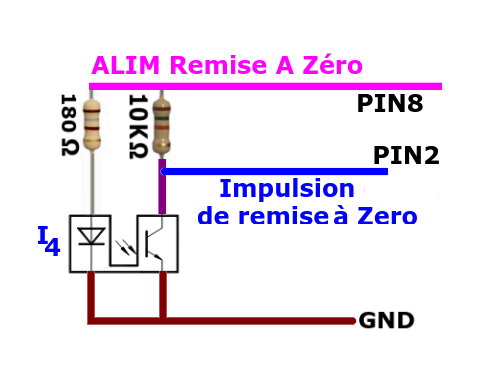 |
Un dernier capteur optoélectronique est utilisé pour la remise à zéro de l’encodeur |
– Carte pour la rotation de la coupole
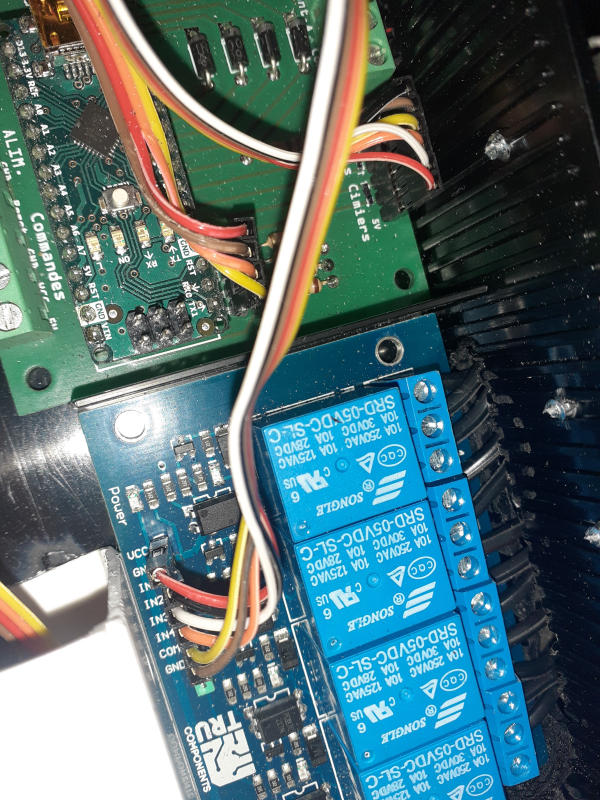
On utilise une carte Arduino Mega pour la gestion de la rotation de la coupole. Cette carte possède 4 ports RS232 en natif.
Un port est utilisé pour la communication vers la carte pour l’ouverture des cimiers
Un port est utilisé pour le pilotage depuis le système Arduin’astro
Un port est utilisé potentiellement pour le pilotage depuis un ordinateur (via NINA par exemple)
De plus, la carte gère aussi les interrupteurs de rotation de la coupole pour une ouverture manuelle.
>Carte pour l’ouverture des cimiers
|
On utilise une carte Arduino Nano pour la gestion de la rotation de la coupole. Compte tenu des contraintes d’encombrement la Nano permet à la fois à répondre à nos besoins et de s’intégrer facilement dans le logement disponible. Le port RS232 est utilisé pour la communication vers la carte pour l’ouverture de rotation qui gère l’ensemble des communications vers les ordinateurs. |
 |
>Alimentation des moteurs
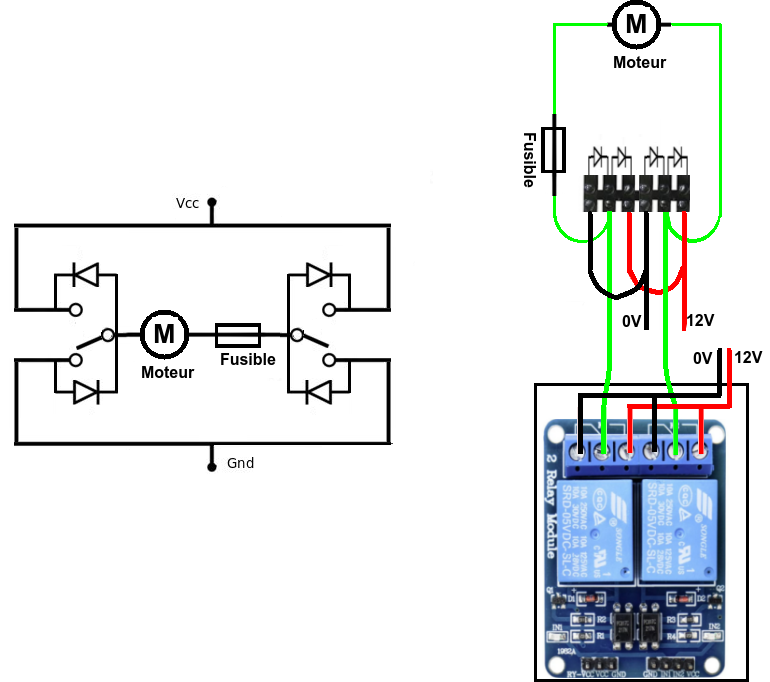 |
Pour la protection du moteur, un fusible de 5 Ampères (type fusible plat de voiture) est placé en série avec le moteur. De plus, l’ensemble est monté avec 4 diodes de roue libre (Diode de puissance 1.5KE36A) afin de protéger les relais du pont en H permettant la gestion du sens de rotation du moteur. |
> Protocole de communication de la coupole
Nous avons opté pour le protocole MaxDome II avec quelques commandes complémentaires. Ce protocole permet de commander intégralement la rotation et l’ouverture de la coupole. Les commandes complémentaires ont été ajoutées afin d’obtenir des informations complémentaires pour la configuration du système. Le protocole MaxDome II est un standard pour le pilotage de commande. Il existe des pilotes ASCOM et INDI. Le protocole est utilisé par des logiciels tels que NINA.
Premiers essais
L’ensemble est globalement fonctionnel mais malgré la faible consommation du système pour l’ouverture du cimier (moins de 1 Watt) il apparaît que la taille du panneau solaire équipant la coupole et les conditions ensoleillement hivernales engendrent une trop grande sollicitation de la batterie de stockage si on oublie d’éteindre le système en fin de nuit. En 15h, la batterie subit une décharge qui peut lui être fatale.
Cette surconsommation est d’autant plus problématique que l’ouverture des cimiers est réalisée à priori une fois durant la soirée et dure moins d’une minute. Il faut donc une dernière petite adaptation…
Installation finale
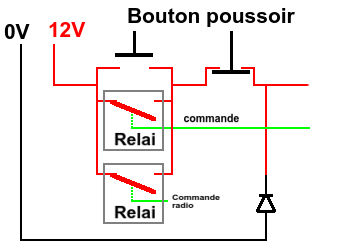
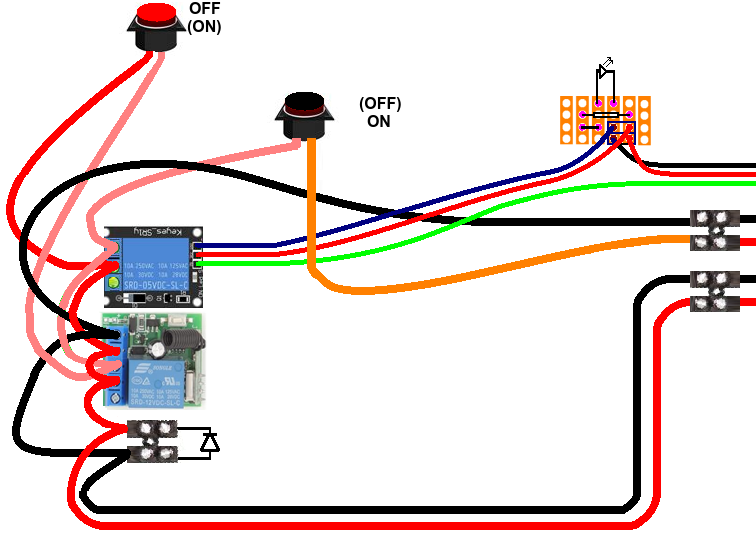
Afin que la carte électronique puisse couper son alimentation en cas d’inactivité, nous optons pour un système de relai piloté par la carte, qui grosso-modo correspond à un montage auto-alimenté.
Après 30 secondes d’inactivité des cimiers, la carte coupe l’alimentation du relai et élimine aussi sa consommation électrique. Afin de piloter à distance l’ouverture des cimiers on adjoint un second relai monté en parallèle du premier. Celui-ci est piloté pour une commande 433 MHz. Le signal de pilotage 433MHz est assuré par la carte Mega. Le système électronique de ce second relai est alimenté en permanence mais sa consommation est suffisamment faible pour ne pas impacter le fonctionnement de recharge de la batterie associées à l’ouverture des cimiers.
 |
 |
A la lumière de cette solution, une système identique est monté sur la carte Méga pour la rotation de la coupole. La temporisation sur la carte Méga est de plusieurs heures, la contrainte d’alimentation n’étant pas aussi problématique pour celle-ci. La commande 433MHz de la carte Mega est assurée par Arduin’Astro. Arduin’Astro étant lui même piloté par le PC de gestion des encodeurs, cette solution nous permet de démarrer la rotation de la coupole et l’ouverture du ciel entièrement depuis l’ordinateur sans à voir besoin d’appuyer sur les boutons d’alimentation manuels.
Bilan
Au choix de l’utilisateur, la coupole peut être asservie à la position du télescope. Pour des soucis d’économie d’énergie et de convivialité, la coupole ne se déplace que si le champ d’ouverture des cimiers ne permet plus d’observer de façon optimale le ciel avec le télescope.
Cet apport est grandement utile lors des séances d’imagerie ou de photométrie, les observations pouvant durer plusieurs heures. La coupole se déplace lors de ces séances automatiquement pour suivre le télescope là où il pointe.
 |